Opportunities to join our lab for an internship will be posted on our new page: https://camp.lcsr.jhu.edu/intern/
Category Archives: Projects
Robotic Ultrasound
 Robotic ultrasound can be used for 3D volume compounding by storing probe poses while acquiring an ultrasound series. Our current effort focuses on a reliable real-time calibration of MRI data to a patient’s body in a robot world coordinate system using a structured-light 3D scanner.
Robotic ultrasound can be used for 3D volume compounding by storing probe poses while acquiring an ultrasound series. Our current effort focuses on a reliable real-time calibration of MRI data to a patient’s body in a robot world coordinate system using a structured-light 3D scanner.
CamC Available for Undergraduates, MSE, and PhD Qualifying Research
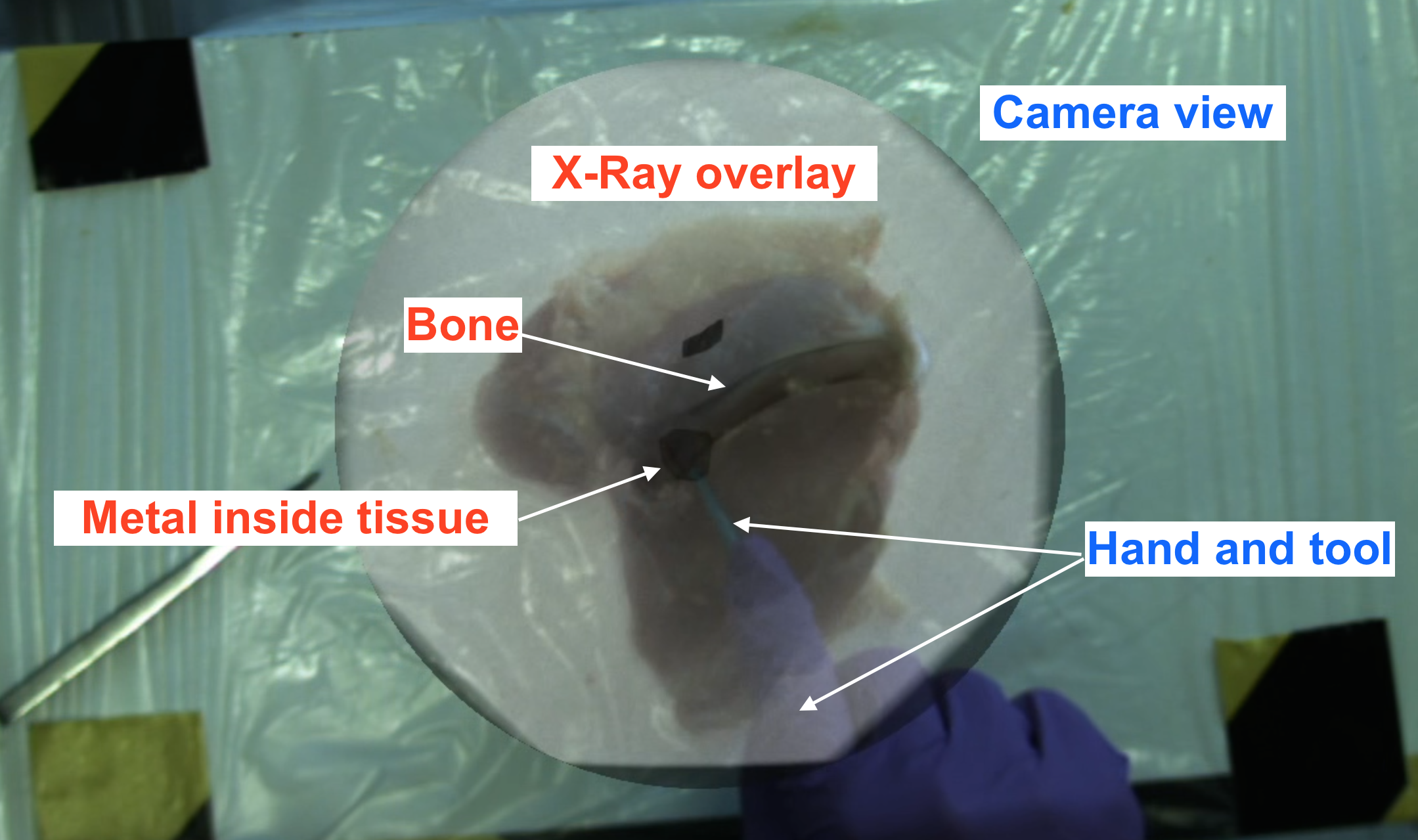
Camera Augmented Mobile C-arm (CamC) is the newest addition to LCSR which was initially invented by Prof. Nassir Navab in 1998 at Siemens Corporate Research. It allows the fusion of X-ray and the optical camera, and it is the only practically accepted intra-operative augmented reality system.
Continue reading CamC Available for Undergraduates, MSE, and PhD Qualifying Research
Mirracle on the Balaur Wall
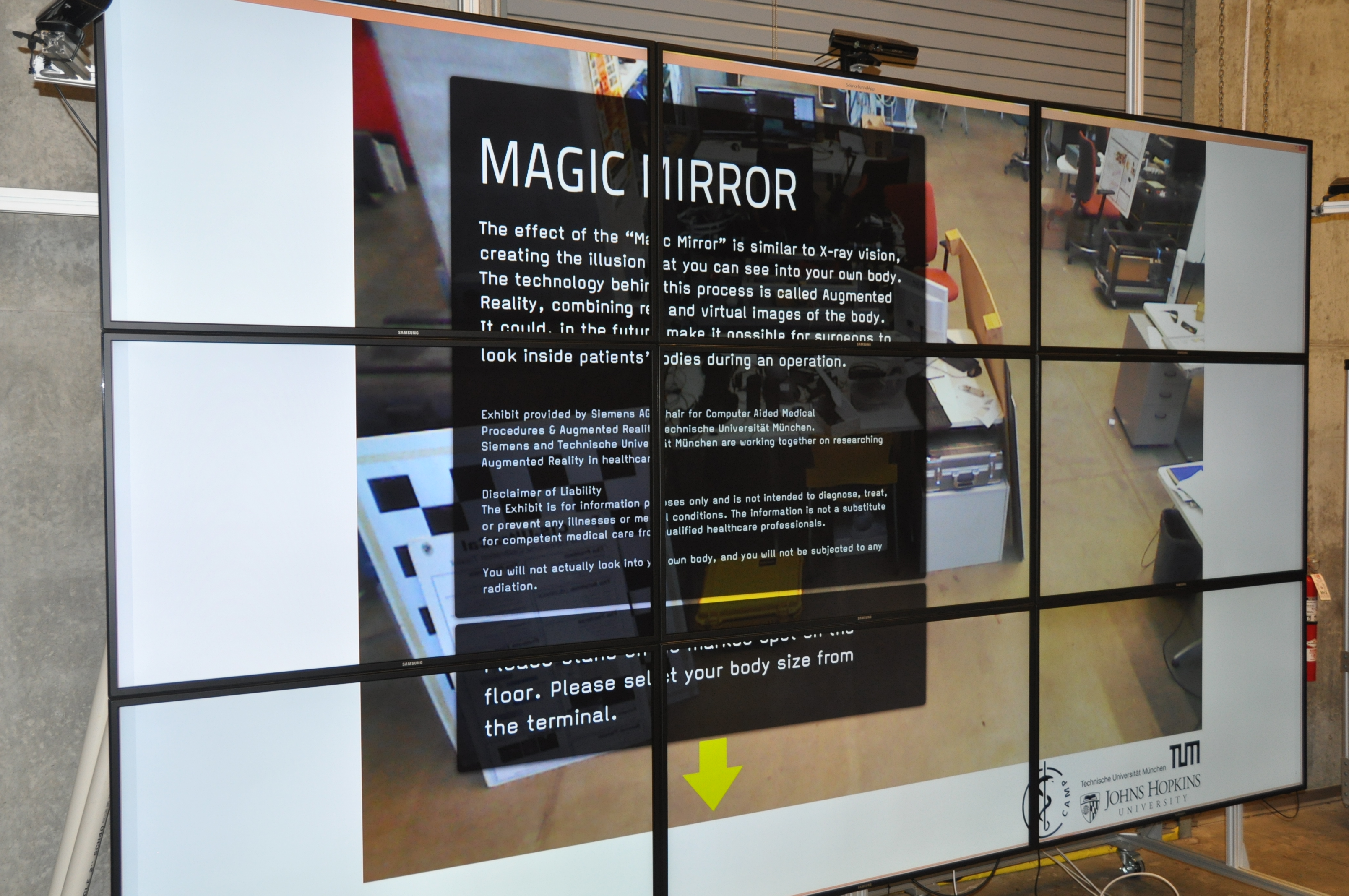

Mirracle is an AR magic mirror system for medical education and training, which uses Microsoft’s Kinect to track a user’s pose and augments medical information onto the user’s body. Continue reading Mirracle on the Balaur Wall